Entfesseln Sie das volle Potenzial Ihrer Projekte mit dem Raspberry Pi PiCAN 2 – dem Schlüssel zur nahtlosen CAN-Bus-Konnektivität! Tauchen Sie ein in eine Welt, in der Ihre Elektronikprojekte nicht nur funktionieren, sondern intelligent kommunizieren und interagieren. Stellen Sie sich vor, Sie könnten komplexe Systeme steuern, Daten in Echtzeit erfassen und Ihre Visionen mit unübertroffener Präzision verwirklichen. Der PiCAN 2 macht es möglich!
Warum der PiCAN 2 Ihr nächstes Projekt revolutionieren wird
Der PiCAN 2 ist mehr als nur eine Schnittstellenkarte; er ist ein Tor zu grenzenlosen Möglichkeiten. Er verbindet Ihren Raspberry Pi mit dem CAN-Bus (Controller Area Network), einem robusten und bewährten Kommunikationsprotokoll, das in der Automobilindustrie, der industriellen Automatisierung und vielen anderen Bereichen eingesetzt wird. Mit dem PiCAN 2 können Sie Daten von Fahrzeugsensoren lesen, Roboter steuern, industrielle Prozesse überwachen und vieles mehr. Lassen Sie sich von der Leistungsfähigkeit und Vielseitigkeit dieses kleinen Boards inspirieren!
Wir verstehen, dass Ihre Projekte einzigartig sind und individuelle Lösungen erfordern. Deshalb haben wir den PiCAN 2 entwickelt, um Ihnen die Flexibilität und Zuverlässigkeit zu bieten, die Sie benötigen. Egal, ob Sie ein erfahrener Ingenieur oder ein begeisterter Hobbybastler sind, der PiCAN 2 ist einfach zu installieren und zu bedienen, sodass Sie sich auf das Wesentliche konzentrieren können: Ihre Ideen zum Leben zu erwecken.
Die unschlagbaren Vorteile des PiCAN 2 auf einen Blick:
- Nahtlose Integration: Speziell für den Raspberry Pi entwickelt, garantiert der PiCAN 2 eine problemlose Installation und Kompatibilität.
- Robust und zuverlässig: Dank hochwertiger Komponenten und sorgfältiger Verarbeitung bietet der PiCAN 2 eine stabile und zuverlässige CAN-Bus-Verbindung, auf die Sie sich verlassen können.
- Vielseitige Einsatzmöglichkeiten: Ob Automobil, Industrie, Robotik oder Heimautomation – der PiCAN 2 ist die perfekte Lösung für eine Vielzahl von Anwendungen.
- Einfache Bedienung: Mit umfassender Dokumentation und Software-Bibliotheken ist der PiCAN 2 auch für Einsteiger leicht zu erlernen und zu bedienen.
- Kosteneffizient: Profitieren Sie von einem hervorragenden Preis-Leistungs-Verhältnis und realisieren Sie Ihre Projekte, ohne Ihr Budget zu sprengen.
Technische Brillanz, die begeistert
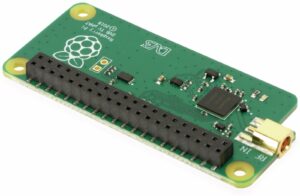
Der PiCAN 2 ist nicht nur benutzerfreundlich, sondern auch mit modernster Technologie ausgestattet. Er basiert auf dem MCP2515 CAN-Controller von Microchip und dem MCP2551 CAN-Transceiver, die für ihre Zuverlässigkeit und Leistungsfähigkeit bekannt sind. Diese Kombination ermöglicht eine schnelle und zuverlässige Datenübertragung über den CAN-Bus mit bis zu 1 Mbit/s.
Darüber hinaus verfügt der PiCAN 2 über eine galvanische Trennung, die Ihren Raspberry Pi vor Überspannungen und anderen elektrischen Störungen schützt. Dies ist besonders wichtig in anspruchsvollen Umgebungen, in denen eine zuverlässige und sichere Verbindung unerlässlich ist.
Die technischen Highlights im Detail:
- CAN-Controller: MCP2515 von Microchip
- CAN-Transceiver: MCP2551 von Microchip
- CAN-Geschwindigkeit: Bis zu 1 Mbit/s
- CAN-Schnittstelle: Standard 9-poliger D-Sub-Stecker
- Galvanische Trennung: Schützt Ihren Raspberry Pi vor elektrischen Störungen
- LED-Anzeigen: Zeigen den Status der CAN-Bus-Verbindung an
- Einfache Installation: Wird direkt auf die GPIO-Leiste des Raspberry Pi gesteckt
Anwendungsbereiche, die Ihre Fantasie beflügeln
Der PiCAN 2 ist ein Werkzeug, das Ihre Kreativität entfesselt und Ihnen ermöglicht, Ihre kühnsten Ideen in die Realität umzusetzen. Hier sind nur einige Beispiele, wie Sie den PiCAN 2 in Ihren Projekten einsetzen können:
Automobil
Tauchen Sie ein in die Welt der Fahrzeugelektronik! Lesen Sie Daten von Fahrzeugsensoren aus, überwachen Sie den Motorstatus, steuern Sie das Infotainmentsystem oder entwickeln Sie eigene Fahrerassistenzsysteme. Der PiCAN 2 ist Ihr Schlüssel zur intelligenten Fahrzeugsteuerung.
- OBD-II-Daten auslesen: Erhalten Sie Einblick in die Motorleistung, den Kraftstoffverbrauch und andere wichtige Fahrzeugparameter.
- Fehlercodes analysieren: Identifizieren Sie potenzielle Probleme frühzeitig und vermeiden Sie teure Reparaturen.
- Eigene Dashboards entwickeln: Gestalten Sie Ihre eigene Benutzeroberfläche zur Anzeige von Fahrzeugdaten.
- Fahrzeugfunktionen steuern: Steuern Sie beispielsweise die Beleuchtung, die Fenster oder die Zentralverriegelung.
Industrielle Automatisierung
Optimieren Sie Ihre industriellen Prozesse mit dem PiCAN 2! Überwachen Sie Maschinen, steuern Sie Roboter, erfassen Sie Daten in Echtzeit und automatisieren Sie komplexe Arbeitsabläufe. Der PiCAN 2 ist Ihr Partner für die intelligente Fabrik der Zukunft.
- Maschinendaten erfassen: Überwachen Sie den Zustand von Maschinen und Anlagen, um Ausfallzeiten zu minimieren.
- Roboter steuern: Programmieren Sie Roboter, um Aufgaben präzise und effizient auszuführen.
- Sensorwerte erfassen: Messen Sie Temperatur, Druck, Feuchtigkeit und andere wichtige Parameter.
- Prozesse automatisieren: Steuern Sie Produktionslinien, Förderbänder und andere industrielle Anlagen.
Robotik
Erwecken Sie Ihre Roboter zum Leben mit dem PiCAN 2! Steuern Sie Motoren, Sensoren und Aktoren, entwickeln Sie intelligente Navigationssysteme und lassen Sie Ihre Roboter mit ihrer Umgebung interagieren. Der PiCAN 2 ist die perfekte Plattform für Ihre Robotikprojekte.
- Motorsteuerung: Steuern Sie die Bewegung Ihrer Roboter mit hoher Präzision.
- Sensorintegration: Verbinden Sie Sensoren, um die Umgebung wahrzunehmen und auf Veränderungen zu reagieren.
- Autonome Navigation: Entwickeln Sie Algorithmen, die Ihren Robotern ermöglichen, sich selbstständig zu bewegen.
- Kommunikation mit anderen Robotern: Lassen Sie Ihre Roboter miteinander kommunizieren und zusammenarbeiten.
Heimautomation
Verwandeln Sie Ihr Zuhause in ein intelligentes Zuhause mit dem PiCAN 2! Steuern Sie Beleuchtung, Heizung, Jalousien und andere Geräte, automatisieren Sie Abläufe und schaffen Sie eine komfortable und energieeffiziente Wohnumgebung. Der PiCAN 2 ist Ihr Schlüssel zum vernetzten Zuhause.
- Beleuchtung steuern: Dimmen Sie das Licht, ändern Sie die Farbe oder schalten Sie es automatisch ein und aus.
- Heizung steuern: Optimieren Sie die Temperatur in Ihrem Zuhause für maximalen Komfort und Energieeffizienz.
- Jalousien steuern: Automatisieren Sie das Öffnen und Schließen der Jalousien, um das Raumklima zu regulieren.
- Sicherheitssysteme integrieren: Verbinden Sie Alarmanlagen, Überwachungskameras und andere Sicherheitseinrichtungen.
Installation und Inbetriebnahme – kinderleicht!
Wir wissen, dass Ihre Zeit kostbar ist. Deshalb haben wir den PiCAN 2 so konzipiert, dass er einfach zu installieren und in Betrieb zu nehmen ist. Stecken Sie den PiCAN 2 einfach auf die GPIO-Leiste Ihres Raspberry Pi, installieren Sie die benötigten Software-Bibliotheken und schon können Sie loslegen. Unsere umfassende Dokumentation und zahlreiche Beispiele helfen Ihnen dabei, den PiCAN 2 schnell und einfach in Ihre Projekte zu integrieren.
Schritt-für-Schritt-Anleitung für einen schnellen Start:
- PiCAN 2 auf den Raspberry Pi stecken: Richten Sie die Pins des PiCAN 2 sorgfältig auf die GPIO-Leiste des Raspberry Pi aus und stecken Sie das Board fest.
- Software installieren: Laden Sie die benötigten Software-Bibliotheken von unserer Website herunter und installieren Sie sie auf Ihrem Raspberry Pi.
- Konfiguration überprüfen: Stellen Sie sicher, dass der CAN-Bus korrekt konfiguriert ist und dass der PiCAN 2 vom Raspberry Pi erkannt wird.
- Loslegen: Schreiben Sie Ihre eigenen Programme oder nutzen Sie unsere Beispiele, um den PiCAN 2 in Ihren Projekten einzusetzen.
Software-Unterstützung, die begeistert
Der PiCAN 2 wird von einer Vielzahl von Software-Bibliotheken und Tools unterstützt, die Ihnen die Entwicklung Ihrer Projekte erleichtern. Egal, ob Sie in C, Python oder einer anderen Programmiersprache entwickeln, Sie finden die passenden Werkzeuge, um den PiCAN 2 optimal zu nutzen.
Beliebte Software-Bibliotheken für den PiCAN 2:
- SocketCAN: Eine standardmäßige CAN-Bus-Schnittstelle unter Linux, die eine einfache und flexible Kommunikation mit dem CAN-Bus ermöglicht.
- Python-CAN: Eine benutzerfreundliche Python-Bibliothek, die den Zugriff auf den CAN-Bus vereinfacht und eine Vielzahl von Funktionen bietet.
- C/C++-Bibliotheken: Leistungsstarke Bibliotheken für die Entwicklung von anspruchsvollen Anwendungen in C oder C++.
Die PiCAN Community – Ihr Netzwerk für Inspiration und Support
Werden Sie Teil unserer lebendigen PiCAN Community und profitieren Sie vom Wissen und der Erfahrung anderer Nutzer. Tauschen Sie sich in Foren aus, teilen Sie Ihre Projekte und lassen Sie sich von den Ideen anderer inspirieren. Unsere Community ist ein Ort, an dem Sie Antworten auf Ihre Fragen finden und neue Freunde gewinnen können.
Ihre Vorteile in der PiCAN Community:
- Hilfe bei Problemen: Stellen Sie Ihre Fragen und erhalten Sie schnelle und kompetente Antworten von anderen Nutzern.
- Inspiration für neue Projekte: Entdecken Sie die Projekte anderer Nutzer und lassen Sie sich von ihren Ideen inspirieren.
- Austausch von Wissen und Erfahrungen: Teilen Sie Ihr Wissen und Ihre Erfahrungen mit anderen und lernen Sie von ihren Fehlern.
- Freundschaften schließen: Treffen Sie andere Elektronikbegeisterte und bauen Sie ein Netzwerk auf.
FAQ – Ihre Fragen, unsere Antworten
Was ist der CAN-Bus und wofür wird er verwendet?
Der CAN-Bus (Controller Area Network) ist ein robustes und bewährtes Kommunikationsprotokoll, das in einer Vielzahl von Anwendungen eingesetzt wird, insbesondere in der Automobilindustrie, der industriellen Automatisierung und der Medizintechnik. Er ermöglicht es Geräten, miteinander zu kommunizieren, ohne dass ein Host-Computer erforderlich ist. Dies macht ihn ideal für Anwendungen, bei denen Zuverlässigkeit und Echtzeit-Datenübertragung entscheidend sind.
Ist der PiCAN 2 mit allen Raspberry Pi Modellen kompatibel?
Der PiCAN 2 ist mit allen Raspberry Pi Modellen kompatibel, die über eine 40-Pin GPIO-Leiste verfügen, einschließlich Raspberry Pi 3, Raspberry Pi 4, Raspberry Pi Zero und Raspberry Pi Zero W.
Benötige ich zusätzliche Hardware, um den PiCAN 2 zu verwenden?
Um den PiCAN 2 zu verwenden, benötigen Sie lediglich einen Raspberry Pi mit einer 40-Pin GPIO-Leiste, ein CAN-Bus-Kabel und gegebenenfalls einen CAN-Bus-Stecker, der mit Ihrem CAN-Bus-Netzwerk kompatibel ist. Zusätzlich benötigen Sie eine Stromversorgung für den Raspberry Pi.
Wie installiere ich die Software für den PiCAN 2?
Die Software-Installation für den PiCAN 2 ist einfach und unkompliziert. Sie können die benötigten Software-Bibliotheken von unserer Website herunterladen und mithilfe der mitgelieferten Anweisungen installieren. Alternativ können Sie auch die SocketCAN-Schnittstelle unter Linux verwenden.
Kann ich den PiCAN 2 verwenden, um Daten von einem Auto auszulesen?
Ja, der PiCAN 2 ist ideal geeignet, um Daten von einem Auto auszulesen, das über einen CAN-Bus verfügt. Sie benötigen jedoch möglicherweise einen OBD-II-Adapter, um den PiCAN 2 mit dem OBD-II-Port Ihres Autos zu verbinden. Bitte beachten Sie, dass der Zugriff auf Fahrzeugdaten je nach Fahrzeugmodell und -hersteller unterschiedlich sein kann.
Ist der PiCAN 2 galvanisch getrennt?
Ja, der PiCAN 2 verfügt über eine galvanische Trennung, die Ihren Raspberry Pi vor Überspannungen und anderen elektrischen Störungen schützt. Dies ist besonders wichtig in anspruchsvollen Umgebungen, in denen eine zuverlässige und sichere Verbindung unerlässlich ist.
Kann ich mehrere PiCAN 2 Boards an einem Raspberry Pi verwenden?
Technisch gesehen ist es möglich, mehrere PiCAN 2 Boards an einem Raspberry Pi zu verwenden, dies erfordert jedoch eine sorgfältige Konfiguration und möglicherweise zusätzliche Hardware, um die GPIO-Pins des Raspberry Pi zu erweitern. In den meisten Fällen ist es einfacher, ein CAN-Bus-Netzwerk mit mehreren Geräten zu erstellen, anstatt mehrere CAN-Bus-Schnittstellen an einem einzigen Raspberry Pi zu verwenden.
Wo finde ich Hilfe, wenn ich Probleme mit dem PiCAN 2 habe?
Wenn Sie Probleme mit dem PiCAN 2 haben, können Sie unsere umfassende Dokumentation auf unserer Website einsehen. Darüber hinaus steht Ihnen unsere lebendige PiCAN Community in Foren zur Verfügung, um Ihnen bei Fragen und Problemen zu helfen. Sie können auch unseren Kundensupport kontaktieren, der Ihnen gerne weiterhilft.