Entdecken Sie die Präzision und Kraft des ACT Nema 17 Schrittmotors – das Herzstück für Ihre ambitionierten Projekte! Dieser Bipolar-Schrittmotor mit seinen kompakten Abmessungen und seiner beeindruckenden Leistung ist der Schlüssel zu geschmeidigen Bewegungen und punktgenauen Positionierungen. Lassen Sie sich von seiner Zuverlässigkeit und Vielseitigkeit inspirieren und heben Sie Ihre Projekte auf ein neues Level!
Der ACT Nema 17 Schrittmotor: Leistung und Präzision in Perfektion
Sie suchen nach einem Schrittmotor, der sowohl kraftvoll als auch präzise ist? Dann ist der ACT Nema 17 genau das Richtige für Sie. Mit seinem Drehmoment von 71 oz-in (ca. 5 Nm) und einer Schrittweite von 1.8° ermöglicht er feinfühlige Bewegungen und zuverlässige Positionierungen. Egal, ob Sie ihn in 3D-Druckern, CNC-Fräsen, Robotik-Anwendungen oder anderen Automatisierungsprojekten einsetzen – dieser Motor wird Ihre Erwartungen übertreffen.
Das „D-Shaft“-Design der Motorwelle sorgt für eine sichere und spielfreie Verbindung mit Ihren Komponenten. Der optimierte Stromverbrauch von 1.5A trägt zur Energieeffizienz Ihrer Projekte bei. Mit dem ACT Nema 17 investieren Sie in Qualität und Leistung, die sich auszahlen.
Technische Daten im Überblick:
- Motortyp: Bipolar Schrittmotor
- Nema Größe: 17
- Schrittwinkel: 1.8°
- Haltemoment: 71 oz-in (ca. 5 Nm)
- Nennstrom: 1.5A
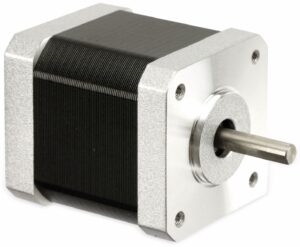
- Wellenform: D-Shaft
- Motorkörper Länge: 40mm
Dieser Schrittmotor ist nicht einfach nur eine Komponente – er ist ein Versprechen. Ein Versprechen für reibungslose Abläufe, präzise Ergebnisse und die Verwirklichung Ihrer kreativen Visionen. Stellen Sie sich vor, wie Ihre Projekte dank dieses zuverlässigen Motors zum Leben erwachen. Die Möglichkeiten sind grenzenlos!
Entfesseln Sie Ihr Potenzial: Anwendungsbereiche des ACT Nema 17
Der ACT Nema 17 ist ein echter Allrounder, der in den unterschiedlichsten Anwendungsbereichen seine Stärken ausspielt. Seine Vielseitigkeit macht ihn zum idealen Partner für anspruchsvolle Projekte und kreative Ideen.
3D-Druck: Präzision für perfekte Ergebnisse
Im 3D-Druck ist Präzision das A und O. Der ACT Nema 17 sorgt für exakte Bewegungen der Druckerdüse und des Druckbetts, wodurch detailreiche und hochwertige Druckergebnisse erzielt werden. Erleben Sie, wie Ihre Modelle Schicht für Schicht zum Leben erwachen – mit der Unterstützung eines Schrittmotors, der keine Kompromisse eingeht.
Stellen Sie sich vor, Sie drucken ein filigranes Architekturobjekt oder ein komplexes mechanisches Bauteil. Jede Linie, jede Kurve wird mit höchster Präzision umgesetzt. Der ACT Nema 17 garantiert, dass Ihre Visionen Realität werden – mit einer Detailgenauigkeit, die begeistert.
CNC-Fräsen: Kraft und Kontrolle für komplexe Formen
Beim CNC-Fräsen ist es entscheidend, dass die Werkzeuge präzise und kraftvoll geführt werden. Der ACT Nema 17 ermöglicht es Ihnen, komplexe Formen und filigrane Details mit Leichtigkeit zu realisieren. Seine hohe Drehmoment sorgt für einen ruhigen Lauf und minimiert Vibrationen, was zu sauberen und präzisen Fräsergebnissen führt.
Denken Sie an die Herstellung von individuellen Schmuckstücken, hochpräzisen Maschinenteilen oder kunstvollen Holzskulpturen. Mit dem ACT Nema 17 haben Sie die Kontrolle über jede Bewegung und können Ihre kreativen Ideen in beeindruckende Realität umsetzen. Erleben Sie, wie Ihre CNC-Fräse mit diesem Motor zu einem wahren Meisterwerkzeug wird.
Robotik: Dynamik und Zuverlässigkeit für innovative Lösungen
In der Robotik sind Dynamik, Präzision und Zuverlässigkeit von entscheidender Bedeutung. Der ACT Nema 17 erfüllt diese Anforderungen mit Bravour. Er ermöglicht flüssige und präzise Bewegungen von Roboterarmen, Greifern und anderen Aktuatoren. Seine robuste Bauweise garantiert einen zuverlässigen Betrieb auch unter anspruchsvollen Bedingungen.
Stellen Sie sich vor, Sie entwickeln einen Roboter, der komplexe Aufgaben in der Produktion übernimmt oder in gefährlichen Umgebungen eingesetzt wird. Der ACT Nema 17 sorgt dafür, dass Ihr Roboter präzise und zuverlässig agiert – und so einen wertvollen Beitrag zu Ihrem Erfolg leistet. Erleben Sie, wie Ihre Robotik-Projekte mit diesem Motor neue Dimensionen erreichen.
Automatisierung: Effizienz und Präzision für optimierte Prozesse
In der Automatisierungstechnik ist es wichtig, Prozesse effizient und präzise zu gestalten. Der ACT Nema 17 ermöglicht es Ihnen, Bewegungsabläufe zu automatisieren und Produktionsprozesse zu optimieren. Seine hohe Genauigkeit und Zuverlässigkeit tragen dazu bei, Fehler zu minimieren und die Produktivität zu steigern.
Denken Sie an die Automatisierung von Verpackungsanlagen, Montageprozessen oder Testsystemen. Mit dem ACT Nema 17 können Sie Arbeitsabläufe beschleunigen, Kosten senken und die Qualität Ihrer Produkte verbessern. Erleben Sie, wie Ihre Automatisierungsprojekte mit diesem Motor zu einem wahren Erfolgsmodell werden.
Doch der ACT Nema 17 ist mehr als nur ein Motor für industrielle Anwendungen. Er ist auch ein idealer Partner für Hobbyisten, Bastler und Maker, die ihre eigenen Projekte realisieren möchten. Ob Sie eine Kamera-Plattform bauen, einen automatischen Bildstabilisator entwickeln oder ein anderes kreatives Projekt umsetzen möchten – dieser Motor bietet Ihnen die Leistung und Präzision, die Sie benötigen.
Warum der ACT Nema 17 Ihre beste Wahl ist
In der Welt der Schrittmotoren gibt es viele Optionen, aber der ACT Nema 17 sticht aus der Masse hervor. Er vereint Qualität, Leistung und Vielseitigkeit in einem überzeugenden Gesamtpaket. Hier sind einige Gründe, warum dieser Motor die beste Wahl für Ihre Projekte ist:
Unübertroffene Präzision:
Mit seinem Schrittwinkel von 1.8° ermöglicht der ACT Nema 17 hochpräzise Bewegungen und Positionierungen. Jede Bewegung wird exakt ausgeführt, wodurch Sie optimale Ergebnisse erzielen.
Kraftvolles Drehmoment:
Das Haltemoment von 71 oz-in (ca. 5 Nm) sorgt für ausreichend Kraft, um auch anspruchsvolle Aufgaben zu bewältigen. Sie können sich darauf verlassen, dass der Motor Ihre Lasten zuverlässig bewegt.
Robuste Bauweise:
Der ACT Nema 17 ist für den Dauereinsatz ausgelegt. Seine hochwertige Verarbeitung und seine robusten Materialien garantieren eine lange Lebensdauer und einen zuverlässigen Betrieb.
Einfache Integration:
Der Motor lässt sich einfach in Ihre bestehenden Systeme integrieren. Dank seiner standardisierten Nema 17 Baugröße und seiner klaren Anschlussbelegung ist die Installation ein Kinderspiel.
Vielseitige Einsatzmöglichkeiten:
Ob 3D-Druck, CNC-Fräsen, Robotik oder Automatisierung – der ACT Nema 17 ist für eine Vielzahl von Anwendungen geeignet. Seine Vielseitigkeit macht ihn zu einem unverzichtbaren Bestandteil Ihrer Werkstatt.
Optimale Energieeffizienz:
Mit einem Nennstrom von 1.5A ist der ACT Nema 17 energieeffizient und trägt zur Reduzierung Ihrer Betriebskosten bei.
Der ACT Nema 17 ist mehr als nur ein Motor – er ist eine Investition in die Qualität und den Erfolg Ihrer Projekte. Er ist ein Werkzeug, mit dem Sie Ihre kreativen Visionen verwirklichen und Ihre technischen Herausforderungen meistern können. Lassen Sie sich von seiner Leistung und Zuverlässigkeit begeistern und erleben Sie, wie Ihre Projekte mit diesem Motor neue Höhen erreichen.
Technische Details im Detail
Für alle, die es genau wissen wollen, hier noch einmal die technischen Details des ACT Nema 17 Schrittmotors im Detail:
Allgemeine Daten:
- Motortyp: Bipolar Schrittmotor
- Nema Größe: 17
- Schrittwinkel: 1.8°
- Schrittgenauigkeit: ±5%
- Isolationswiderstand: 100 MΩ min. (500V DC)
- Isolationsfestigkeit: 500V AC für 1 Minute
- Betriebstemperaturbereich: -20°C bis +50°C
Elektrische Daten:
- Haltemoment: 71 oz-in (ca. 5 Nm)
- Nennstrom: 1.5A
- Widerstand pro Phase: 2.2 Ω ±10%
- Induktivität pro Phase: 3.8 mH ±20%
- Spannung: 4.9V
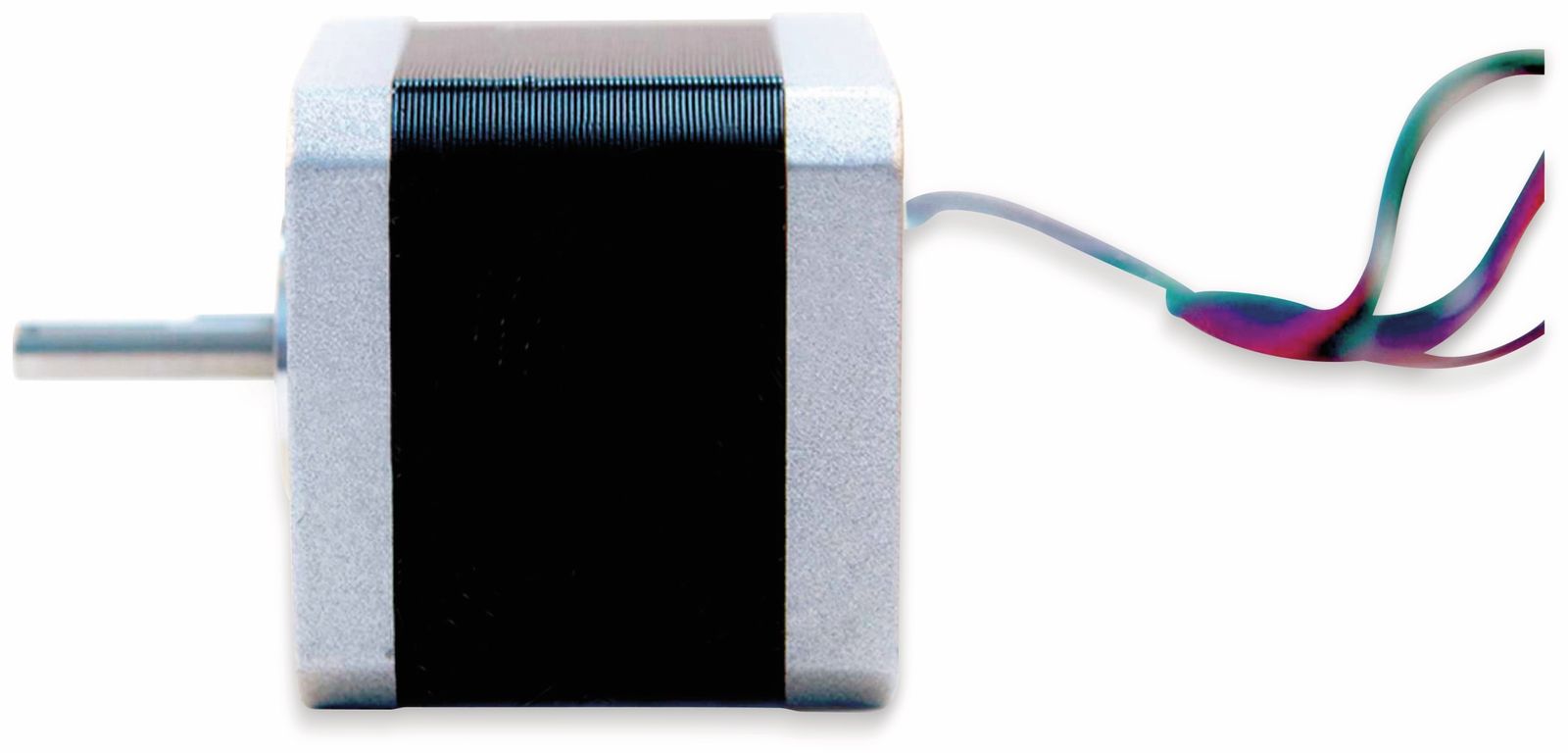
Mechanische Daten:
- Motorkörper Länge: 40mm
- Wellendurchmesser: 5mm
- Wellenlänge: 22mm
- Wellenform: D-Shaft
- Gewicht: ca. 300g
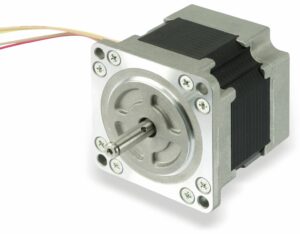
Anschlussbelegung:
- A+: Rot
- A-: Grün
- B+: Gelb
- B-: Blau
Diese detaillierten technischen Daten geben Ihnen einen umfassenden Überblick über die Leistungsfähigkeit des ACT Nema 17 Schrittmotors. Sie können sich darauf verlassen, dass dieser Motor Ihre Anforderungen erfüllt und Ihre Erwartungen übertrifft.
Montage und Anschluss
Die Montage und der Anschluss des ACT Nema 17 Schrittmotors sind denkbar einfach und unkompliziert. Hier finden Sie eine detaillierte Anleitung, die Ihnen Schritt für Schritt zeigt, wie Sie den Motor in Ihr Projekt integrieren können:
Montage:
- Vorbereitung: Stellen Sie sicher, dass Sie alle notwendigen Werkzeuge und Materialien zur Hand haben, einschließlich Schrauben, Muttern, Unterlegscheiben und eventuell eine Montageplatte.
- Befestigung: Platzieren Sie den Motor auf der Montagefläche und richten Sie ihn aus. Verwenden Sie die vier Befestigungslöcher am Motor, um ihn mit Schrauben zu fixieren. Achten Sie darauf, dass die Schrauben nicht zu fest angezogen werden, um Beschädigungen am Motor zu vermeiden.
- Ausrichtung: Stellen Sie sicher, dass der Motor korrekt ausgerichtet ist, um einen reibungslosen Betrieb zu gewährleisten. Überprüfen Sie, ob die Welle frei drehbar ist und keine Hindernisse vorhanden sind.
Anschluss:
- Identifizierung der Kabel: Identifizieren Sie die vier Kabel des Motors anhand der Farbcodierung (A+: Rot, A-: Grün, B+: Gelb, B-: Blau).
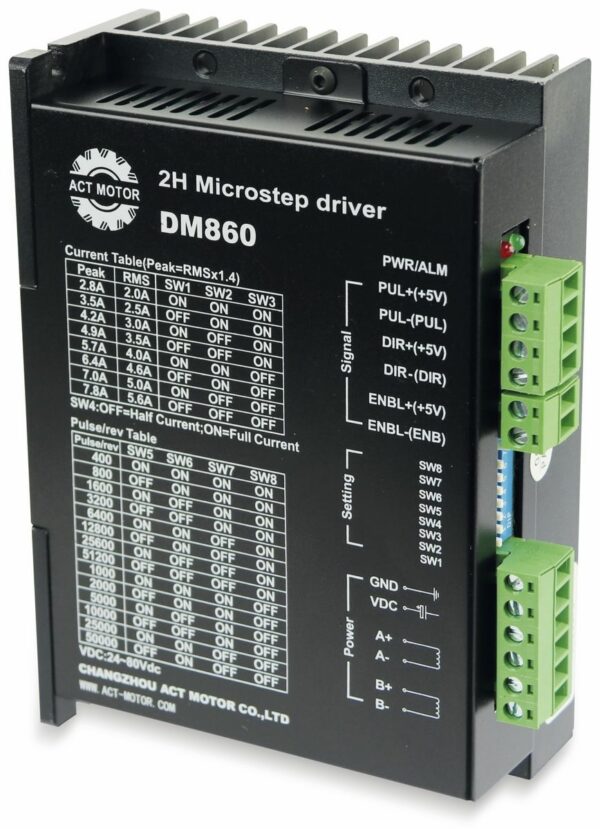
- Anschluss an den Treiber: Verbinden Sie die Kabel mit dem entsprechenden Schrittmotortreiber. Achten Sie darauf, dass die Polarität korrekt ist, um Schäden am Motor oder Treiber zu vermeiden.
- Konfiguration des Treibers: Konfigurieren Sie den Schrittmotortreiber entsprechend den technischen Daten des Motors (Strom, Spannung, Mikroschrittauflösung). Beachten Sie die Anweisungen des Treiberherstellers.
- Test: Führen Sie einen Testlauf durch, um sicherzustellen, dass der Motor korrekt funktioniert. Überprüfen Sie, ob sich der Motor in die gewünschte Richtung bewegt und keine ungewöhnlichen Geräusche oder Vibrationen auftreten.
Mit dieser einfachen Anleitung können Sie den ACT Nema 17 Schrittmotor problemlos in Ihre Projekte integrieren. Sollten Sie dennoch Fragen haben, stehen wir Ihnen gerne mit Rat und Tat zur Seite.
Sicherheitshinweise
Bei der Arbeit mit dem ACT Nema 17 Schrittmotor ist es wichtig, einige grundlegende Sicherheitsvorkehrungen zu beachten, um Unfälle und Schäden zu vermeiden:
- Spannungsversorgung: Stellen Sie sicher, dass die Spannungsversorgung den Spezifikationen des Motors entspricht. Eine zu hohe Spannung kann den Motor beschädigen.
- Überhitzung: Vermeiden Sie eine Überhitzung des Motors. Sorgen Sie für eine ausreichende Kühlung, insbesondere bei längeren Betriebsdauern.
- Kurzschlüsse: Vermeiden Sie Kurzschlüsse in der Verkabelung. Überprüfen Sie regelmäßig die Anschlüsse und Kabel auf Beschädigungen.
- Mechanische Belastung: Vermeiden Sie eine übermäßige mechanische Belastung des Motors. Verwenden Sie geeignete Befestigungselemente und stellen Sie sicher, dass die Lasten innerhalb der Spezifikationen liegen.
- Umgebung: Verwenden Sie den Motor nur in einer geeigneten Umgebung. Vermeiden Sie den Einsatz in feuchten oder staubigen Umgebungen.
- Persönliche Schutzausrüstung: Tragen Sie bei Bedarf persönliche Schutzausrüstung, wie z.B. Schutzbrille und Handschuhe.
Indem Sie diese Sicherheitshinweise beachten, können Sie einen sicheren und zuverlässigen Betrieb des ACT Nema 17 Schrittmotors gewährleisten.
FAQ – Häufig gestellte Fragen
Was bedeutet die Nema 17 Bezeichnung?
Die Bezeichnung Nema 17 bezieht sich auf die Baugröße des Schrittmotors. Sie standardisiert die Abmessungen der Montagefläche und der Welle, wodurch die Austauschbarkeit zwischen verschiedenen Herstellern gewährleistet wird. Ein Nema 17 Motor hat eine quadratische Montagefläche von 1,7 x 1,7 Zoll (ca. 43 x 43 mm).
Was bedeutet „Bipolar“ bei einem Schrittmotor?
Ein bipolarer Schrittmotor hat zwei Wicklungen pro Phase, die in entgegengesetzter Richtung angesteuert werden. Dies ermöglicht eine höhere Drehmomentausbeute im Vergleich zu unipolaren Schrittmotoren. Bipolare Motoren benötigen jedoch einen komplexeren Treiber, da die Polarität der Spannung in den Wicklungen umgekehrt werden muss.
Was bedeutet der Schrittwinkel von 1.8°?
Der Schrittwinkel von 1.8° gibt an, um wie viel Grad sich die Motorwelle bei einem einzelnen Schritt dreht. Ein Schrittwinkel von 1.8° entspricht 200 Schritten pro Umdrehung (360° / 1.8° = 200). Dies ermöglicht eine präzise Positionierung und feinfühlige Bewegungen.
Was ist ein D-Shaft und welche Vorteile bietet er?
Ein D-Shaft ist eine Motorwelle, die auf einer Seite abgeflacht ist. Diese Abflachung sorgt für eine formschlüssige Verbindung mit der Last oder dem Getriebe. Dies verhindert ein Durchrutschen und ermöglicht eine zuverlässige Kraftübertragung. D-Shafts sind besonders geeignet für Anwendungen, bei denen hohe Drehmomente übertragen werden müssen.
Wie wähle ich den richtigen Schrittmotortreiber für den ACT Nema 17 aus?
Bei der Auswahl des passenden Schrittmotortreibers sollten Sie auf folgende Punkte achten:
- Strom: Der Treiber muss den Nennstrom des Motors (1.5A) liefern können.
- Spannung: Der Treiber muss die passende Spannung für den Motor bereitstellen (in der Regel 12V bis 24V).
- Mikroschrittauflösung: Der Treiber sollte eine Mikroschrittauflösung unterstützen, um die Präzision und Laufruhe des Motors zu erhöhen.
- Schutzfunktionen: Der Treiber sollte über Schutzfunktionen wie Überstromschutz, Überspannungsschutz und Überhitzungsschutz verfügen.
Kann ich den ACT Nema 17 auch mit einer Arduino steuern?
Ja, der ACT Nema 17 kann problemlos mit einem Arduino gesteuert werden. Hierfür benötigen Sie einen geeigneten Schrittmotortreiber, der mit dem Arduino kompatibel ist. Es gibt zahlreiche Bibliotheken und Tutorials, die Ihnen bei der Ansteuerung des Motors mit dem Arduino helfen.
Wie kann ich die Drehrichtung des Motors ändern?
Die Drehrichtung des Motors kann durch Umkehren der Polarität einer der beiden Wicklungen (A oder B) geändert werden. Dies kann entweder durch eine entsprechende Konfiguration des Schrittmotortreibers oder durch manuelles Vertauschen der Kabel erfolgen.
Wie kann ich die Geschwindigkeit des Motors steuern?
Die Geschwindigkeit des Motors kann durch die Frequenz der Steuersignale (Pulse) gesteuert werden, die an den Schrittmotortreiber gesendet werden. Je höher die Frequenz, desto schneller dreht sich der Motor.
Was ist das maximale Drehmoment, das der Motor liefern kann?
Das maximale Drehmoment, das der ACT Nema 17 liefern kann, beträgt 71 oz-in (ca. 5 Nm). Dieses Drehmoment wird jedoch nur bei niedrigen Drehzahlen erreicht. Bei höheren Drehzahlen nimmt das Drehmoment ab.
Wie kann ich den Motor vor Überlastung schützen?
Um den Motor vor Überlastung zu schützen, sollten Sie sicherstellen, dass die Lasten innerhalb der Spezifikationen liegen. Verwenden Sie außerdem einen Schrittmotortreiber mit Überstromschutz, der den Motor bei einer Überlastung automatisch abschaltet.