Entdecken Sie den ACT Nema17 Schrittmotor, einen Schlüsselspieler für Ihre ambitioniertesten Projekte! Dieser Bipolar-Schrittmotor vereint Präzision, Kraft und Zuverlässigkeit in einem kompakten Design. Ob Sie an Robotik, 3D-Druck, CNC-Maschinen oder anderen anspruchsvollen Anwendungen arbeiten, dieser Motor wird Ihre Erwartungen übertreffen und Ihre kreativen Visionen zum Leben erwecken.
Kraftvolle Leistung für Ihre Projekte
Der ACT Nema17 Schrittmotor ist mehr als nur ein Bauteil; er ist das Herzstück, das Ihre Projekte mit Leben füllt. Mit einem beeindruckenden Haltemoment von 71 oz-in (50 Ncm) bietet dieser Motor die nötige Kraft, um auch anspruchsvolle Aufgaben mit Bravour zu meistern. Stellen Sie sich vor, wie mühelos Ihre Roboterarme schwere Lasten heben oder Ihre CNC-Fräse präzise Schnitte ausführt. Dieser Motor macht es möglich.
Die Bipolar-Bauweise sorgt für eine optimale Nutzung des magnetischen Feldes, was zu einer höheren Effizienz und einem geringeren Energieverbrauch führt. Das bedeutet für Sie: mehr Leistung bei geringeren Betriebskosten. Ein Gewinn für Ihre Projekte und die Umwelt.
Präzision bis ins kleinste Detail
In der Welt der Technik zählt jedes Detail. Der ACT Nema17 Schrittmotor bietet eine Schrittweite von 1.8°, was einer Auflösung von 200 Schritten pro Umdrehung entspricht. Diese hohe Präzision ermöglicht es Ihnen, Bewegungen mit unglaublicher Genauigkeit zu steuern. Egal, ob Sie filigrane Muster in Holz gravieren oder komplexe 3D-Modelle drucken, dieser Motor liefert die Präzision, die Sie benötigen.
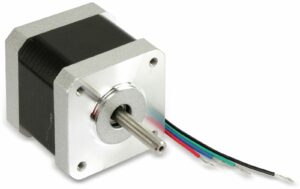
Die D-Welle mit einem Durchmesser von 5 mm sorgt für eine sichere und zuverlässige Verbindung zu Ihren Antriebskomponenten. Die flache Seite der Welle verhindert ein Durchrutschen und gewährleistet eine optimale Kraftübertragung. So können Sie sich voll und ganz auf Ihr Projekt konzentrieren, ohne sich Gedanken über mechanische Probleme machen zu müssen.
Technische Daten im Überblick
Um Ihnen einen umfassenden Überblick über die Leistungsfähigkeit des ACT Nema17 Schrittmotors zu geben, haben wir die wichtigsten technischen Daten übersichtlich zusammengefasst:
| Eigenschaft | Wert |
|---|---|
| Motortyp | Bipolar Schrittmotor |
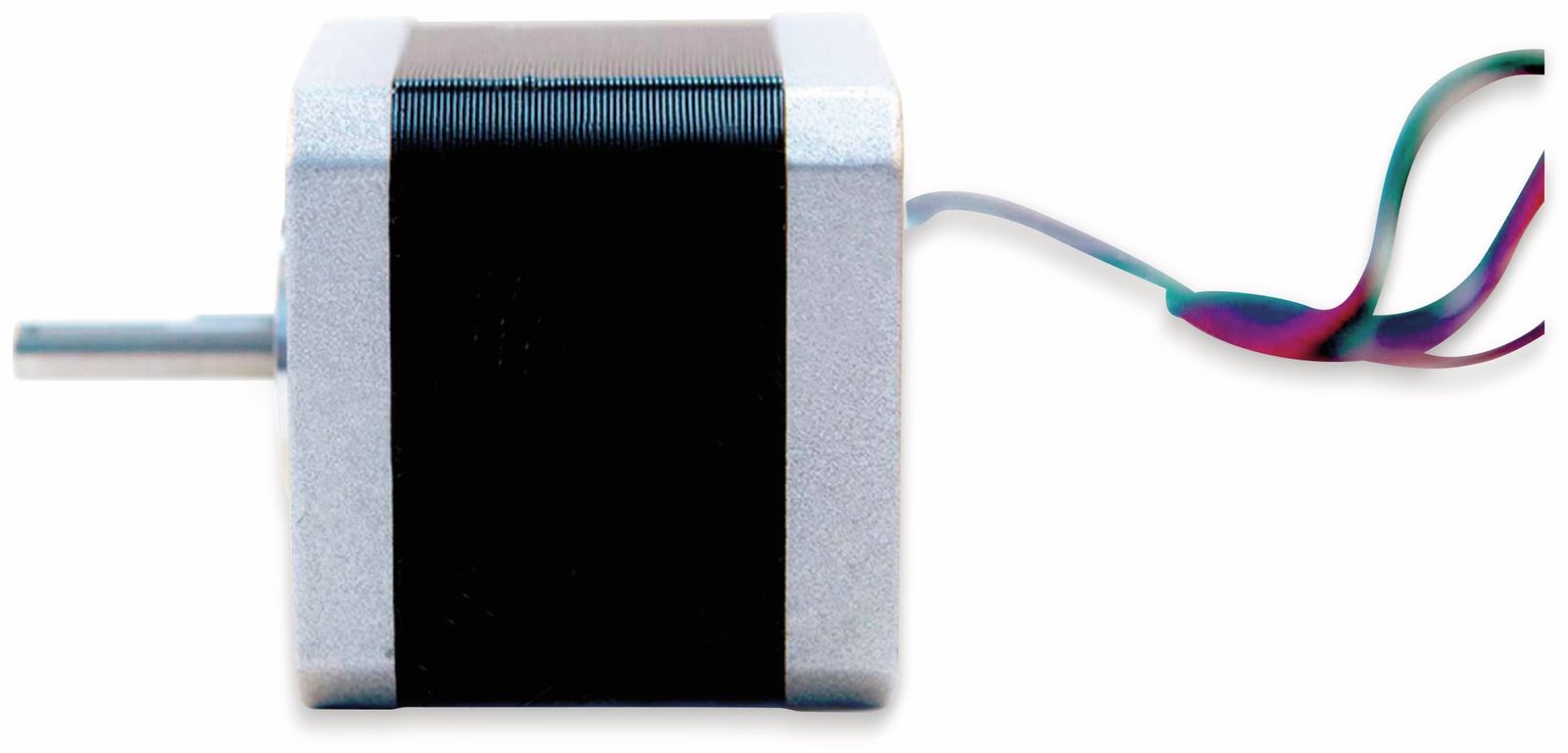
| Nema Größe | 17 |
| Schrittwinkel | 1.8° |
| Haltemoment | 71 oz-in (50 Ncm) |
| Nennstrom | 1A |
| Wellendurchmesser | 5 mm (D-Welle) |
| Motorlänge | 40 mm |
| Anzahl der Phasen | 2 |
| Widerstand pro Phase | 3.3 Ohm |
| Induktivität pro Phase | 4.8 mH |
| Rotorträgheit | 68 g-cm² |
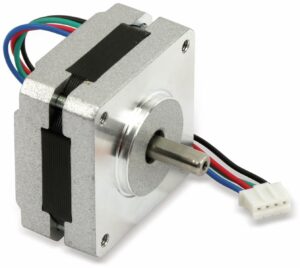
| Anschluss | 4 Drähte |
| Gewicht | ca. 300 g |
Vielseitige Einsatzmöglichkeiten
Der ACT Nema17 Schrittmotor ist ein echter Alleskönner und eignet sich für eine Vielzahl von Anwendungen. Hier sind einige Beispiele, wie Sie diesen Motor in Ihren Projekten einsetzen können:
- 3D-Druck: Steuern Sie die Bewegung der Achsen präzise und erstellen Sie detailreiche 3D-Modelle.
- CNC-Maschinen: Fräsen, gravieren und schneiden Sie Materialien mit höchster Genauigkeit.
- Robotik: Bauen Sie Roboterarme, mobile Roboter und andere Automatisierungssysteme.
- Laser Cutter: Nutzen Sie die präzise Steuerung für exakte Schnitte und Gravuren.
- Kamera-Systeme: Erstellen Sie motorisierte Schwenk- und Neigeköpfe für professionelle Aufnahmen.
- Automatisierungstechnik: Optimieren Sie Produktionsprozesse und steigern Sie die Effizienz.
- DIY-Projekte: Lassen Sie Ihrer Kreativität freien Lauf und realisieren Sie Ihre eigenen technischen Visionen.
Die Vielseitigkeit dieses Motors kennt kaum Grenzen. Lassen Sie sich inspirieren und entdecken Sie neue Möglichkeiten, wie Sie den ACT Nema17 Schrittmotor in Ihren Projekten einsetzen können.
Einfache Integration und Steuerung
Wir wissen, dass die Integration neuer Komponenten in bestehende Systeme manchmal eine Herausforderung sein kann. Deshalb haben wir darauf geachtet, dass der ACT Nema17 Schrittmotor einfach zu installieren und zu steuern ist.
Der Motor verfügt über vier Anschlussdrähte, die eine einfache Verbindung zu gängigen Schrittmotor-Treibern ermöglichen. Die Standard-Nema17-Bauweise sorgt für eine problemlose Montage in bestehenden Halterungen und Gehäusen.
Es gibt eine Vielzahl von Open-Source-Bibliotheken und Tutorials, die Ihnen den Einstieg in die Steuerung von Schrittmotoren erleichtern. Egal, ob Sie Anfänger oder erfahrener Profi sind, Sie werden schnell in der Lage sein, diesen Motor in Ihren Projekten einzusetzen.
Qualität, die überzeugt
Bei uns steht Qualität an erster Stelle. Der ACT Nema17 Schrittmotor wird aus hochwertigen Materialien gefertigt und unterliegt strengen Qualitätskontrollen. So können wir sicherstellen, dass Sie ein Produkt erhalten, das zuverlässig und langlebig ist.
Das robuste Gehäuse schützt den Motor vor äußeren Einflüssen und sorgt für eine lange Lebensdauer. Die präzise gefertigten Lager gewährleisten einen ruhigen und vibrationsarmen Lauf.
Wir sind von der Qualität unserer Produkte überzeugt und bieten Ihnen eine umfassende Garantie. Sollten Sie wider Erwarten Probleme mit dem Motor haben, stehen wir Ihnen gerne zur Seite.
Ein Motor für Ihre Zukunft
Der ACT Nema17 Schrittmotor ist mehr als nur ein Produkt; er ist eine Investition in Ihre Zukunft. Mit diesem Motor sind Sie bestens gerüstet, um Ihre technischen Visionen zu verwirklichen und innovative Projekte zu entwickeln.
Stellen Sie sich vor, wie Sie mit diesem Motor Ihre eigenen 3D-Drucker bauen, komplexe Roboter steuern oder präzise CNC-Maschinen entwickeln. Die Möglichkeiten sind endlos.
Warten Sie nicht länger und bestellen Sie noch heute Ihren ACT Nema17 Schrittmotor. Lassen Sie sich von der Kraft, Präzision und Zuverlässigkeit dieses Motors begeistern und bringen Sie Ihre Projekte auf das nächste Level.
FAQ – Häufig gestellte Fragen
Welchen Treiber benötige ich für den ACT Nema17 Schrittmotor?
Für den ACT Nema17 Schrittmotor benötigen Sie einen Bipolar-Schrittmotor-Treiber, der einen Strom von mindestens 1A liefern kann. Beliebte Optionen sind der A4988, DRV8825 oder TMC2208. Achten Sie darauf, den Treiber entsprechend den Spezifikationen des Motors einzustellen, um eine optimale Leistung zu erzielen und Schäden zu vermeiden. Ein präziser eingestellter Strom sorgt für ein optimales Ergebnis.
Wie schließe ich den Motor richtig an?
Der ACT Nema17 Schrittmotor hat vier Drähte, die in zwei Spulen unterteilt sind. Die typische Farbcodierung ist wie folgt: A+ (Grün), A- (Schwarz), B+ (Rot), B- (Blau). Verbinden Sie die A+ und A- Drähte mit den entsprechenden Anschlüssen Ihres Schrittmotortreibers für Spule A, und die B+ und B- Drähte mit den Anschlüssen für Spule B. Achten Sie darauf, die Polarität korrekt zu beachten. Bei falscher Verdrahtung kann der Motor nicht richtig funktionieren oder beschädigt werden.
Kann ich den Motor mit einem Arduino steuern?
Ja, der ACT Nema17 Schrittmotor kann problemlos mit einem Arduino gesteuert werden. Sie benötigen zusätzlich einen Schrittmotortreiber, da der Arduino nicht direkt genügend Strom liefern kann. Verbinden Sie die Steuersignale (Step und Direction) des Treibers mit den digitalen Ausgängen des Arduino. Verwenden Sie eine passende Bibliothek, um die Schrittmotorbewegungen zu programmieren. Es gibt viele Tutorials und Beispiele online, die Ihnen den Einstieg erleichtern.
Was bedeutet „Nema 17“?
„Nema 17“ bezieht sich auf die Baugröße des Schrittmotors, definiert durch den Standard des National Electrical Manufacturers Association (NEMA). Die Zahl 17 gibt die Größe der Frontplatte des Motors in Zoll an (1.7 x 1.7 Zoll oder ca. 43 x 43 mm). Nema 17 Motoren sind weit verbreitet und bieten ein gutes Gleichgewicht zwischen Größe, Leistung und Kosten. Die standardisierte Baugröße ermöglicht eine einfache Austauschbarkeit und Kompatibilität mit verschiedenen Halterungen und Zubehör.
Welche Drehzahl kann ich mit dem Motor erreichen?
Die maximale Drehzahl des ACT Nema17 Schrittmotors hängt von verschiedenen Faktoren ab, einschließlich der Versorgungsspannung, des Treibers und der Last. Generell gilt, dass höhere Spannungen höhere Drehzahlen ermöglichen, aber auch das Risiko von Resonanzen und Schrittverlusten erhöhen können. Es ist ratsam, die Drehzahl schrittweise zu erhöhen und die Leistung des Motors zu überwachen, um ein optimales Ergebnis zu erzielen. Experimentieren Sie mit verschiedenen Einstellungen, um die beste Balance zwischen Drehzahl und Drehmoment für Ihre Anwendung zu finden.
Wie berechne ich die benötigte Spannung für den Motor?
Die benötigte Spannung für den ACT Nema17 Schrittmotor hängt vom verwendeten Treiber und der gewünschten Leistung ab. Als Faustregel gilt, dass eine höhere Spannung schnellere Drehzahlen ermöglicht, aber auch das Risiko von Überhitzung erhöht. Viele Treiber haben eine empfohlene Spannungsbereich. Ein Wert zwischen 12V und 24V ist ein guter Ausgangspunkt. Überprüfen Sie immer die Spezifikationen Ihres Treibers und des Motors, um sicherzustellen, dass die Spannung innerhalb der zulässigen Grenzen liegt. Achten Sie auch auf die Wärmeentwicklung des Motors und des Treibers und verwenden Sie gegebenenfalls Kühlkörper.
Was ist der Unterschied zwischen Bipolar und Unipolar Schrittmotoren?
Bipolar- und Unipolar-Schrittmotoren unterscheiden sich in ihrer Bauweise und Ansteuerung. Bipolar-Motoren haben zwei Spulen, die in entgegengesetzter Richtung bestromt werden müssen, um eine Bewegung zu erzeugen. Dies erfordert einen komplexeren Treiber, bietet aber ein höheres Drehmoment. Unipolar-Motoren haben eine Mittelanzapfung an jeder Spule, was die Ansteuerung vereinfacht, aber das Drehmoment reduziert. Der ACT Nema17 ist ein Bipolar-Motor, der ein höheres Drehmoment und eine präzisere Steuerung ermöglicht.
Was bedeutet Haltemoment?
Das Haltemoment ist das maximale Drehmoment, das der Schrittmotor erzeugen kann, während er in einer bestimmten Position gehalten wird, ohne dass er sich bewegt. Es wird in der Regel in oz-in (Unzen-Zoll) oder Ncm (Newton-Zentimeter) angegeben. Ein höheres Haltemoment bedeutet, dass der Motor eine größere Last halten kann, ohne seine Position zu verlieren. Das Haltemoment ist ein wichtiger Faktor bei der Auswahl eines Schrittmotors für Anwendungen, bei denen eine präzise Positionierung und das Halten einer Last erforderlich sind.
Wie kann ich Schrittverluste vermeiden?
Schrittverluste treten auf, wenn der Schrittmotor aufgrund von Überlastung, zu hoher Drehzahl oder Resonanzen Schritte verliert und seine Position nicht korrekt beibehält. Um Schrittverluste zu vermeiden, sollten Sie sicherstellen, dass der Motor nicht überlastet wird, die Drehzahl nicht zu hoch ist und der Treiber korrekt eingestellt ist. Verwenden Sie eine Rampe beim Beschleunigen und Abbremsen, um ruckartige Bewegungen zu vermeiden. Eine höhere Versorgungsspannung kann helfen, das Drehmoment bei höheren Drehzahlen aufrechtzuerhalten. Die Verwendung von Closed-Loop-Systemen mit Encodern kann ebenfalls helfen, Schrittverluste zu erkennen und zu kompensieren.