Hier ist deine Produktbeschreibung für den ACT Nema34 Schrittmotor:
Entfesseln Sie die Kraft präziser Bewegung mit dem ACT Nema34 Schrittmotor!
Sind Sie bereit, Ihre Projekte auf ein neues Level zu heben? Suchen Sie nach einem Motor, der unübertroffene Präzision, Kraft und Zuverlässigkeit vereint? Dann ist der ACT Nema34 Schrittmotor genau das, wonach Sie gesucht haben. Dieser kraftvolle Bipolar-Schrittmotor wurde entwickelt, um selbst anspruchsvollste Aufgaben mit Bravour zu meistern und Ihre kreativen Visionen Wirklichkeit werden zu lassen.
Die unschlagbare Leistung des ACT Nema34 Schrittmotors
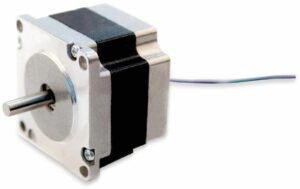
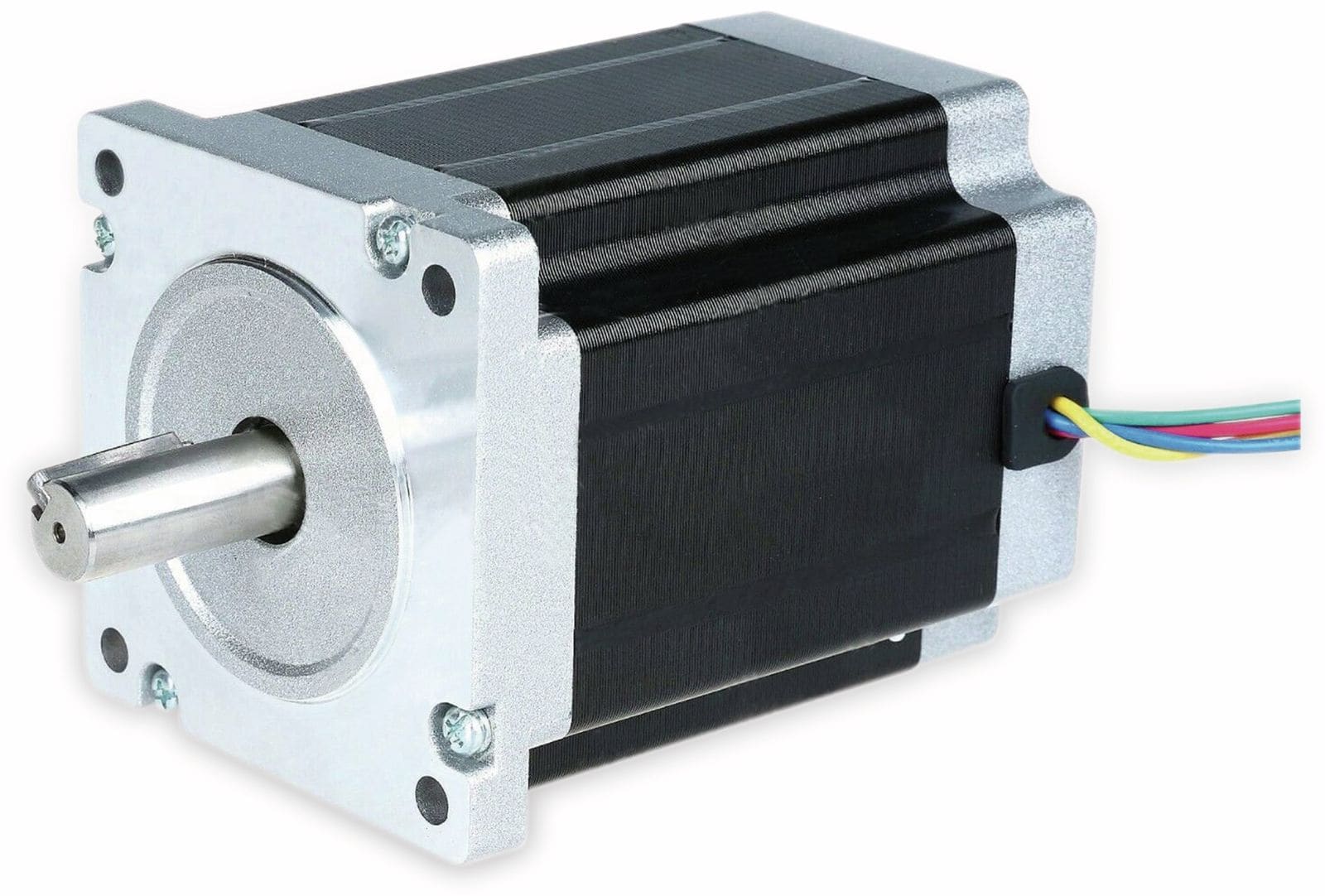
Der ACT Nema34 ist nicht einfach nur ein Motor – er ist ein Kraftpaket, das darauf wartet, entfesselt zu werden. Mit einem beeindruckenden Haltemoment von 1700 oz-in (ca. 12 Nm) überwindet er mühelos Widerstände und ermöglicht ruckfreie, präzise Bewegungen. Egal, ob Sie ihn in CNC-Fräsen, 3D-Druckern, Robotik-Anwendungen oder anderen anspruchsvollen Projekten einsetzen, dieser Motor wird Ihre Erwartungen übertreffen.
Seine robuste Bauweise garantiert eine lange Lebensdauer und zuverlässige Leistung auch unter härtesten Bedingungen. Die Passfederwelle sorgt für eine sichere und spielfreie Verbindung mit Ihren mechanischen Systemen, sodass Sie sich voll und ganz auf die Präzision Ihrer Projekte konzentrieren können.
Mit einem Schrittwinkel von 1.8° bietet der ACT Nema34 eine hohe Auflösung, die feinfühlige Bewegungen und exakte Positionierung ermöglicht. Dies ist entscheidend für Anwendungen, bei denen es auf jedes Detail ankommt. Die Stromaufnahme von 6A sorgt für eine effiziente Kraftübertragung und eine optimale Balance zwischen Leistung und Energieverbrauch.
Technische Daten im Überblick:
- Motortyp: Bipolar Schrittmotor
- Nema Größe: 34
- Haltemoment: 1700 oz-in (ca. 12 Nm)
- Wellenart: Passfederwelle
- Stromaufnahme: 6A
- Schrittwinkel: 1.8°
- Länge: 126mm
Warum der ACT Nema34 die richtige Wahl für Sie ist
Die Wahl des richtigen Motors ist entscheidend für den Erfolg Ihrer Projekte. Der ACT Nema34 bietet Ihnen eine Reihe von Vorteilen, die ihn von anderen Motoren auf dem Markt abheben:
- Unübertroffene Präzision: Dank des kleinen Schrittwinkels und der hochwertigen Verarbeitung erzielen Sie mit diesem Motor eine außergewöhnliche Genauigkeit bei jeder Bewegung.
- Enorme Kraft: Das hohe Haltemoment ermöglicht es Ihnen, auch schwere Lasten mühelos zu bewegen und anspruchsvolle Aufgaben zu bewältigen.
- Hohe Zuverlässigkeit: Die robuste Bauweise und die hochwertigen Materialien garantieren eine lange Lebensdauer und eine zuverlässige Leistung, auch unter harten Bedingungen.
- Vielseitige Einsatzmöglichkeiten: Ob CNC-Fräse, 3D-Drucker, Roboter oder andere Anwendungen – der ACT Nema34 ist ein echter Allrounder und passt sich Ihren Bedürfnissen an.
- Einfache Integration: Die Passfederwelle ermöglicht eine einfache und sichere Verbindung mit Ihren mechanischen Systemen.
Stellen Sie sich vor, wie Sie mit diesem Motor komplexe 3D-Modelle drucken, präzise Gravuren erstellen oder Roboter bauen, die jede Bewegung exakt ausführen. Der ACT Nema34 ist der Schlüssel, um Ihre Visionen in die Realität umzusetzen.
Anwendungsbereiche des ACT Nema34 Schrittmotors
Die Einsatzmöglichkeiten des ACT Nema34 sind nahezu unbegrenzt. Hier sind einige Beispiele, wie Sie diesen kraftvollen Motor in Ihren Projekten einsetzen können:
- CNC-Fräsen: Erstellen Sie präzise und detaillierte Werkstücke mit hoher Geschwindigkeit und Genauigkeit.
- 3D-Drucker: Drucken Sie komplexe Modelle mit feinen Details und einer hohen Oberflächenqualität.
- Robotik: Bauen Sie Roboterarme, mobile Roboter oder andere Automatisierungssysteme mit präzisen und zuverlässigen Bewegungen.
- Laserschneider: Schneiden Sie Materialien mit hoher Präzision und erstellen Sie filigrane Designs.
- Automatisierungstechnik: Steuern Sie Maschinen und Prozesse mit hoher Genauigkeit und Effizienz.
- Medizintechnik: Entwickeln Sie medizinische Geräte und Instrumente, die höchste Präzision und Zuverlässigkeit erfordern.
- Textilmaschinen: Steuern Sie komplexe Web- und Stickmuster mit höchster Genauigkeit.
Lassen Sie Ihrer Kreativität freien Lauf und entdecken Sie die unzähligen Möglichkeiten, die Ihnen der ACT Nema34 bietet. Dieser Motor ist mehr als nur ein Bauteil – er ist ein Werkzeug, mit dem Sie Ihre Ideen verwirklichen und Ihre Projekte auf ein neues Level heben können.
Technische Details im Detail
Für alle, die es genau wissen wollen, hier eine detaillierte Auflistung der technischen Spezifikationen des ACT Nema34 Schrittmotors:
Detaillierte Spezifikationen:
| Eigenschaft | Wert |
|---|---|
| Motortyp | Bipolar Schrittmotor |
| Nema Größe | 34 |
| Haltemoment | 1700 oz-in (ca. 12 Nm) |
| Schrittwinkel | 1.8° |
| Stromaufnahme | 6A |
| Wellenart | Passfederwelle |
| Wellen Durchmesser | 14 mm |
| Wellen Länge | 30 mm |
| Motor Länge | 126 mm |
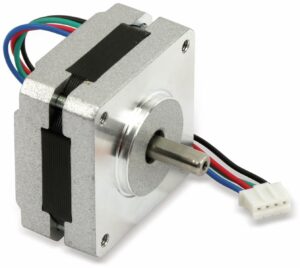
| Anzahl der Adern | 4 |
| Phasenwiderstand | 0.55 Ohm |
| Phaseninduktivität | 3.6 mH |
| Trägheitsmoment | 3600 g-cm² |
| Gewicht | 3.2 kg |
| Isolationswiderstand | 100 MOhm Min., 500V DC |
| Isolationsklasse | B (130°C) |
| Betriebstemperaturbereich | -20°C bis +50°C |
Diese detaillierten Informationen helfen Ihnen, den Motor optimal in Ihre Projekte zu integrieren und sicherzustellen, dass er Ihren Anforderungen entspricht.
Installation und Inbetriebnahme
Die Installation und Inbetriebnahme des ACT Nema34 Schrittmotors ist denkbar einfach. Dank der standardisierten Nema 34 Baugröße lässt er sich problemlos in bestehende Systeme integrieren. Die Passfederwelle sorgt für eine sichere und spielfreie Verbindung mit Ihren mechanischen Komponenten.
Schließen Sie den Motor gemäß den Herstellerangaben an Ihre Schrittmotorsteuerung an. Achten Sie dabei auf die korrekte Polarität der Wicklungen. Verwenden Sie hochwertige Kabel und Stecker, um eine zuverlässige Verbindung zu gewährleisten.
Nach dem Anschluss können Sie den Motor mit Ihrer Steuerung konfigurieren und die gewünschten Parameter wie Schrittauflösung, Beschleunigung und Geschwindigkeit einstellen. Beachten Sie die maximale Stromaufnahme des Motors, um Schäden zu vermeiden.
Mit der richtigen Konfiguration und Steuerung erzielen Sie mit dem ACT Nema34 Schrittmotor eine präzise und zuverlässige Leistung in Ihren Projekten.
FAQ – Häufig gestellte Fragen zum ACT Nema34 Schrittmotor
Welche Steuerung benötige ich für den ACT Nema34 Schrittmotor?
Der ACT Nema34 Schrittmotor ist ein Bipolar-Schrittmotor und benötigt daher eine Bipolar-Schrittmotorsteuerung. Achten Sie darauf, dass die Steuerung die erforderliche Spannung und den Strom liefern kann (6A pro Phase). Es gibt eine Vielzahl von Steuerungen auf dem Markt, die für diesen Motor geeignet sind, von einfachen Modulen bis hin zu komplexen CNC-Steuerungen. Informieren Sie sich vor dem Kauf, ob die Steuerung Ihren Anforderungen entspricht.
Wie schließe ich den Motor richtig an?
Der ACT Nema34 Schrittmotor hat vier Anschlussdrähte. Die korrekte Verkabelung ist entscheidend für die Funktion des Motors. Normalerweise sind die Drähte farblich gekennzeichnet. Beachten Sie das Datenblatt des Motors oder die Dokumentation Ihrer Steuerung, um die korrekte Zuordnung der Drähte zu den A+ A- B+ B- Anschlüssen der Steuerung zu finden. Eine falsche Verkabelung kann zu Schäden am Motor oder der Steuerung führen.
Welche Spannung benötige ich für den ACT Nema34 Schrittmotor?
Die benötigte Spannung hängt von der verwendeten Schrittmotorsteuerung ab. Viele Steuerungen arbeiten mit Spannungen zwischen 24V und 48V. Höhere Spannungen können zu einer besseren Leistung bei höheren Drehzahlen führen. Beachten Sie jedoch die maximale Spannungsangabe Ihrer Steuerung und des Motors, um Schäden zu vermeiden.
Kann ich den Motor auch mit einem Arduino steuern?
Ja, es ist möglich, den ACT Nema34 Schrittmotor mit einem Arduino zu steuern. Allerdings benötigen Sie dafür eine geeignete Schrittmotorsteuerung, die zwischen dem Arduino und dem Motor geschaltet wird. Der Arduino selbst kann den hohen Strom, den der Motor benötigt, nicht liefern. Es gibt spezielle Arduino-Shields für Schrittmotoren, die die Ansteuerung erleichtern.
Welches Netzteil benötige ich für den ACT Nema34 Schrittmotor?
Das Netzteil muss genügend Leistung liefern, um die Steuerung und den Motor zu versorgen. Berechnen Sie den benötigten Strom, indem Sie den Strombedarf des Motors (6A pro Phase) mit der Anzahl der Motoren multiplizieren, die Sie gleichzeitig betreiben möchten. Addieren Sie dann noch etwas Reserve, um sicherzustellen, dass das Netzteil nicht überlastet wird. Wählen Sie ein Netzteil mit einer passenden Spannung (meist 24V oder 48V), die Ihrer Steuerung entspricht.
Wie kann ich die Geschwindigkeit und Beschleunigung des Motors steuern?
Die Geschwindigkeit und Beschleunigung des Motors werden über die Schrittmotorsteuerung gesteuert. Die Steuerung sendet Impulse an den Motor, die ihn dazu bringen, sich schrittweise zu bewegen. Durch Ändern der Frequenz der Impulse können Sie die Geschwindigkeit des Motors steuern. Die Beschleunigung wird durch die Änderung der Frequenz über die Zeit gesteuert. Die meisten Schrittmotorsteuerungen bieten Möglichkeiten, diese Parameter einzustellen und zu optimieren.
Was ist der Unterschied zwischen Bipolar und Unipolar Schrittmotoren?
Bipolar-Schrittmotoren haben zwei Wicklungen pro Phase, während Unipolar-Schrittmotoren eine Mittelanzapfung in jeder Wicklung haben. Bipolar-Motoren bieten in der Regel ein höheres Drehmoment als Unipolar-Motoren gleicher Größe. Der ACT Nema34 ist ein Bipolar-Schrittmotor, was bedeutet, dass er eine höhere Leistung und Effizienz bietet.
Was bedeutet „Nema 34“?
„Nema“ steht für National Electrical Manufacturers Association, eine Organisation, die Standards für elektrische Geräte festlegt. „34“ bezieht sich auf die Flanschgröße des Motors in Zoll, genauer gesagt 3.4 x 3.4 Zoll (ca. 86 x 86 mm). Diese Standardisierung ermöglicht es, Motoren verschiedener Hersteller problemlos auszutauschen.
Wie finde ich das passende Getriebe für den ACT Nema34 Schrittmotor?
Die Wahl des passenden Getriebes hängt von Ihren spezifischen Anforderungen ab. Überlegen Sie, welches Drehmoment und welche Geschwindigkeit Sie benötigen. Ein Getriebe kann das Drehmoment erhöhen und die Geschwindigkeit verringern oder umgekehrt. Achten Sie auf das Übersetzungsverhältnis des Getriebes und stellen Sie sicher, dass es für die Nema 34 Baugröße geeignet ist. Berücksichtigen Sie auch die Belastbarkeit des Getriebes, um eine lange Lebensdauer zu gewährleisten.
Wo finde ich technische Zeichnungen und weitere Informationen zum ACT Nema34 Schrittmotor?
Technische Zeichnungen und weitere detaillierte Informationen finden Sie in der Regel auf der Website des Herstellers (ACT Motor GmbH) oder in den technischen Datenblättern, die dem Produkt beiliegen. Diese Dokumente enthalten wichtige Informationen zu Abmessungen, Anschlussbelegungen und Leistungsdaten des Motors.